Vítám vás u pokračování tématu o polarizaci a spinu částic. V prvním díle jsme zlehka naznačili matematický aparát a obecné principy, v tomto článku jich dále budeme využívat, proto pokud budete potřebovat, velmi doporučuji otevřít si první článek a v případě matematických nejasností zde se na něho odkazovat, mělo by tam být vysvětleno vše důležité.
Co je to spin?
Bohužel, u fyziky malých částic, jak jsme řekli dříve, poměrně slušně selhávají makroskopické představy o principech, stejně tak i jakákoliv snaha vysvětlit, k čemu spin částice připodobnit. Velmi blízce by se dal spin připodobnit jako moment hybnosti částice, ale ne v tom významu, že s ním můžeme zacházet libovolně jak chceme, ve své podstatě se jedná o experimentálně ověřenou hodnotu, která byla “tak nějak” potřeba přidat do co nejcelkovějšího modelu chování částic.[1]Pro další informace rozhodně doporučuji tento popis experimentu: ElektronovySpin.pdf. Říká nám zjednoduše, kolikrát musíme danou částici otočit, aby se nám jevila opět stejně. Pokud máme spin 1, poté musíme částici otočit o celých 360 stupňů, pokud 2, stačí 180 stupňů. Spin dané částice je (jeho velikost) přesně dána a nelze tuto hodnotu změnit. Navíc tyto hodnoty mohou nabývat pouze celočíselných a nebo polovičních násobků \(\hbar\)[2]Redukované planckovy konstanty, tedy \(\hbar=\frac{h}{2\pi}\)., tedy spiny můžeme mít \(\left(1,\frac{1}{2},-\frac{1}{2},-1,\frac{3}{2},\ldots\right)\) a tak podobně.
Směr spinu částice (nikoliv jeho hodnotu) můžeme měnit např. magnetickým polem, kterým částice prochází. Budeme-li se pohybovat v běžných třech osách pohybu (pravolevá, hornodolní a předozadní), můžeme jednoduše spin označit jako horní, dolní, pravý, levý atd. Pro tato označování je zaběhnuté používání písmenek z anglických slov toto popisující, toho se budeme držet i zde — tedy u jako up, d jako down atd. Pokud si nyní představíme spin jako rotaci, tato rotace bude mít nějakou osu[3]Opět — osu bude mít pouze v makroskopickém světě, v případě spinu hovořit o ose rotace je chybné.. Stačí nám tedy pro popis spinu jako takového pouze znázornění směru této osy, a to je právě výše zmíněné u nebo d.
Tak nějak asi tušíme, že se spinem to bude velmi podobné jako s polarizací částice. Budeme-li mít např. nějaký experiment, který nám říká, jestli měřená částice má spin u nebo d, pokud do tohoto experimentu pošleme u částici, řekne nám, že máme spin u a naopak. Stejně jako u polarizace, pokud pošleme do experimentu částici, která má spin natočený pod nějakým úhlem, dosáhneme určitého poměru u a d v tomto experimentu (při větším počtu částic, třeba 100 částic, tedy získáme třeba 60 % částic s u a 40 % s d.)
Bra-ketovým zápisem (pro oživení doporučuji 1. díl seriálu) tedy můžeme daný spin částice zapsat jako:
$$|p_s\rangle=\alpha|\mathrm{u}\rangle+\beta|\mathrm{d}\rangle$$
Tedy že daný spin \(p_s\) bude součtem amplitud pravděpodobností pro u a d. Abychom z amplitudy pravděpodobnosti dostali přímo pravděpodobnost, musíme “umocnit na druhou” — jenže pozor, toto platí pouze pro \(\mathbb{R}\). Pro \(\mathbb{C}\) budeme muset použít součin dvou komplexně konjugovaných čísel, tedy \(\alpha\alpha^*\)[4]Komplexně konjugované číslo, pro zopakování, je číslo, které má stejnou reálnou část, ale opačnou imaginární. Sami vidíme, že u reálných čísel se jedná opravdu o “umocnění na druhou”. Samozřejmě rovnou vidíme, že pravděpodobnosti budou muset být:
$$\alpha\alpha^*+\beta\beta^*=1$$
Také rovnou vidíme následující možnosti[5]vše vztaženo k experimentu, kdy měříme “je to u?” :
$$
p_{u}=1|\mathrm{u}\rangle+0|\mathrm{d}\rangle\\
p_{d}=0|\mathrm{u}\rangle+1|\mathrm{d}\rangle\\
p_{r}=\frac{1}{\sqrt{2}}|\mathrm{u}\rangle+\frac{1}{\sqrt{2}}|\mathrm{d}\rangle
$$
Co však značí přímo \(\mathrm{u}\) a \(\mathrm{d}\)? Jedná se o dva ortonormální vektory[6]Velmi podobné ortogonálním, jen mají jednotkovou velikost. Ortogonální vektory nám říkají, že pokud je jeden “něčím”, pak ten druhý je vším jen ne “něčím”, tedy např. pokud jeden vektor popisuje stav u, poté ortogonální popisuje stav přesně ne-u, tedy d 🙂 (Ano, tyto vektory jsou tedy lineárně nezávislé a tvoří bázi prostoru, ale lineární algebru nechme na jindy.) , velmi podobně jako v případě polarizace. Musíme se ještě podívat na jeden “zvláštní typ” polarizace, tedy kruhovou polarizaci.
Kruhová polarizace
Jak asi víme, světlo je označováno jako elektromagnetické vlnění, což značí přesně to, co to je — obsahuje jak “elektrickou” tak “magnetickou” část. Představíme-li si světelný paprsek, který putuje prostorem nějakým přímým směrem:
Tento světelný paprsek je tvořen dvěma kolmými vlněními — elektrickým a magnetickým. Ty se mohou vyskytovat pouze jako “kolmé” veličiny na směr šíření paprsku, budou se tedy pohybovat v rovině:
Vlnění se tedy může rozkmitávat pouze po této plošce. Vlnění elektrické a magnetické je na sebe vzájemně kolmé, tedy:
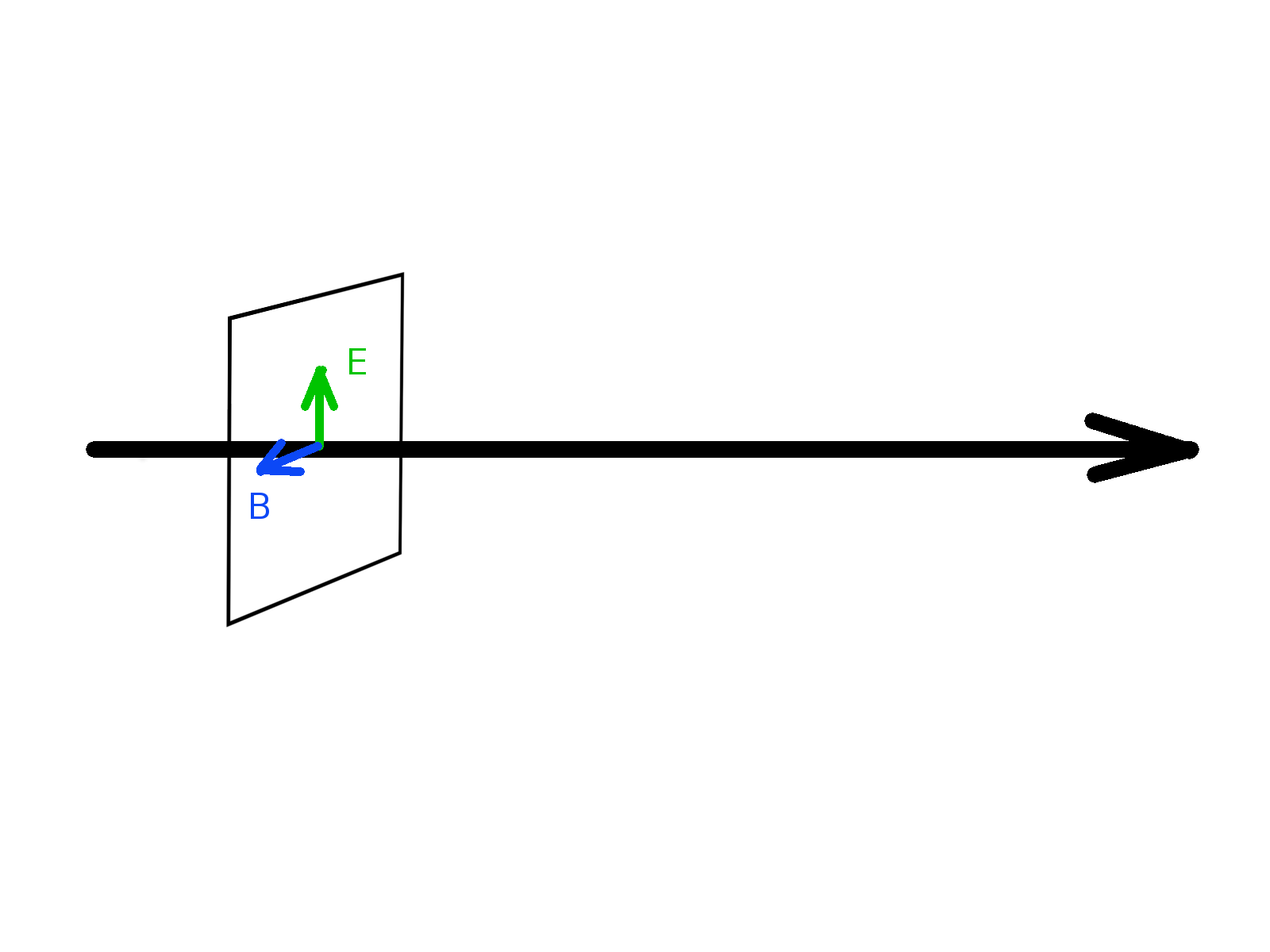
Nutno podotknouti, že obrázek je velmi silně mimo proporce, elektrická část vlnění je totiž mnohem silnější než magnetická, ale teď nám jde spíše o zobrazení principu než o správné proporce grafu 🙂
Nicméně k výpočtům samotným. Pokud budeme předpokládat, že \(E\) a \(B\) jsou kolmé a jsou to klasické vlny (sinusovky), označíme-li souřadné osy takto:

Tedy že vlna se pohybuje po ose \(z\), poté můžeme psát pro intenzity:
$$
E_x=E_{E_{max}}\sin(k\mathbb{\mathrm{z}}+\omega t)\\
E_y=E_{B_{max}}\cos(k\mathbb{\mathrm{z}}+\omega t)
$$
Budeme-li naší rovinou posouvat po ose \(z\), uvidíme, že se nám budou prakticky střídat dvě základní polarizace — tam, kde bude hodnota \(E_E\) maximální, tam bude hodnota \(E_B\) minimální a naopak. Budou se prakticky neustále dohánět, bude to právě vypadat, jako kdyby se vektor polarizace neustále otáčel; proto kruhová polarizace.
Zkusme se nyní podívat na bra-ketový zápis takového jevu a jak vůbec na to. Budeme předpokládat, že pro naši polarizaci bude platit něco jako (předpokládejme, že \(p_{kr}\) bude znamenat “Polarizace kruhová doprava”, tedy ve směru hodinových ručiček, ale pro začátek je to vlastně jedno):
$$|p_{kr}>=\alpha|\mathrm{x}\rangle+\beta|\mathrm{y}\rangle$$
Což by značilo, že musí existovat taková pravděpodobnost, kdy \(\alpha^2+\beta^2=1\). V čem je tady problém? Vidíme, že obě čísla budou kladná, pokud je zvolíme z \(\mathbb{R}\)[7]Protože 2. mocnina čehokoliv z $latex\mathbb{R}$ bude kladné číslo.. Proto musíme začít pokukovat po oblasti $latex\mathbb{C}$, tedy komplexních číslech. Pokud bychom zvolili:
$$1|x\rangle+i|y\rangle$$
Mohli bychom namítat, že to přece nefunguje, protože \(1^2+i^2=1-1=0\neq1\). Jenže! V prvním článku jsme si řekli, že abychom se dostali z pravděpodobnostních amplitud do přímé pravděpodobnosti, musíme nikoliv pouze umocnit, ale vynásobit komplexně konjugovaným číslem, tedy výpočet bude:
$$\alpha\alpha^*+\beta\beta^*=1$$
A to už fungovat bude:
$$1\cdot 1^*+i\cdot i^*=1\cdot 1 + i\cdot (-i) = 2$$
To sice taktéž není \(0\), ale už se blížíme k cíli, musíme pouze nanormovat jednotlivé operandy, stejně jako jsme dělali v prvním článku:
$$
\frac{1}{\sqrt{2}}\frac{1^*}{\sqrt{2}}+\frac{i}{\sqrt{2}}\frac{i^*}{\sqrt{2}}=
\frac{1}{2}+\frac{1}{2}=1
$$
Vektor kruhové polarizace vpravo \(p_{kr+}\) a vlevo \(p_{kr-}\) tedy můžeme napsat jako:
$$
|p_{kr+}\rangle=\begin{pmatrix}\frac{1}{\sqrt{2}}\\\frac{i}{\sqrt{2}}\end{pmatrix}\\
|p_{kr-}\rangle=\begin{pmatrix}\frac{1}{\sqrt{2}}\\\frac{-i}{\sqrt{2}}\end{pmatrix}
$$
Zkusme nyní klasický pokus s částicí s jednou a filtrem s druhou polarizací a ověřme, jestli pro danou polarizaci platí předpokladané, tedy že částice neprojde. Připravme čáscici s polarizací v protisměru hodinových ručiček a přožeňme ji filtrem, který propouští pouze částice s polarizací ve směru hod. ručiček. Uvědomme si taktéž, že původní předpis pro řešení spočívá v použití prvního vektoru v konjugované formě!:
$$
\langle{}p_{kr-}|p_{kr+}\rangle=
\begin{pmatrix}\frac{1}{\sqrt{2}} & \frac{i}{\sqrt{2}}\end{pmatrix}
\begin{pmatrix}\frac{1}{\sqrt{2}}\\\frac{i}{\sqrt{2}}\end{pmatrix}=
\frac{1}{\sqrt{2}}\frac{1}{\sqrt{2}}+\frac{i}{\sqrt{2}}\frac{i}{\sqrt{2}}=
\frac{1}{2}+\frac{-1}{2}=0
$$
Stejně tak, pokud použijeme přesně inverzní zadání, tedy:
$$
\langle{}p_{kr+}|p_{kr-}\rangle=
\begin{pmatrix}\frac{1}{\sqrt{2}} & \frac{-i}{\sqrt{2}}\end{pmatrix}
\begin{pmatrix}\frac{1}{\sqrt{2}}\\\frac{-i}{\sqrt{2}}\end{pmatrix}=
\frac{1}{\sqrt{2}}\frac{1}{\sqrt{2}}+\frac{-i}{\sqrt{2}}\frac{-i}{\sqrt{2}}=
\frac{1}{2}+\frac{(-i)^2}{2}=\frac{1}{2}-\frac{1}{2}=0
$$
Zkusme nyní ještě pokus s kruhově polarizovaným světlem a polarizačním filtrem pod nějakým obecným úhlem \(\phi\):
$$
\langle{}\phi|p_{kr+}\rangle=
\begin{pmatrix}\cos\left(\phi\right) & \sin\left(\phi\right)\end{pmatrix}
\begin{pmatrix}\frac{1}{\sqrt{2}} \\ \frac{i}{\sqrt{2}}\end{pmatrix}=
\cos(\phi)\frac{1}{\sqrt{2}}+\sin(\phi)\frac{i}{\sqrt{2}}
$$
Abychom z tuté pravděpodobnostní amplitudy dostali pravděpodobnost, musíme samozřejmě:
$$
\left(\langle{}\phi|p_{kr+}\rangle\right)^2=
\left(\frac{1}{\sqrt{2}}\cos(\phi)+\frac{i}{\sqrt{2}}\sin(\phi)\right)^2=\\=
\left(\frac{1}{\sqrt{2}}\cos(\phi)+\frac{i}{\sqrt{2}}\sin(\phi)\right)\left(\frac{1}{\sqrt{2}}\cos(\phi)+\frac{-i}{\sqrt{2}}\sin(\phi)\right)=\\=
\left(\frac{1}{2}\cos^2(\phi)-\frac{i^2}{2}\sin^2(\phi)\right)=
\left(\frac{1}{2}\cos^2(\phi)+\frac{1}{2}\sin^2(\phi)\right)=
\frac{1}{2}\left(\cos^2(\phi)+\sin^2(\phi)\right)=\frac{1}{2}
$$
Využijme ještě testu s hermitovským operátorem, který můžeme definovat takto[8]Viz https://www.eng.tau.ac.il/~shtaif/PolarizationClass.pdf.[9]Co to je, jsme řešili v minulém článku.:
$$
\begin{pmatrix}
0 & -i \\
i & 0
\end{pmatrix}
$$
A tedy jestli vyhovuje výrazu:
$$
\begin{pmatrix}
0 & -i \\
i & 0
\end{pmatrix}
\begin{pmatrix}
\frac{1}{\sqrt{2}} \\
\frac{i}{\sqrt{2}}
\end{pmatrix}
=
\lambda
\begin{pmatrix}
\frac{1}{\sqrt{2}} \\
\frac{i}{\sqrt{2}}
\end{pmatrix}
$$
Roznásobíme-li tedy:
$$
\begin{pmatrix}
0 & -i \\
i & 0
\end{pmatrix}
\begin{pmatrix}
\frac{1}{\sqrt{2}} \\
\frac{i}{\sqrt{2}}
\end{pmatrix}
=
\begin{pmatrix}
0\frac{1}{\sqrt{2}} – i\frac{i}{\sqrt{2}} \\
i\frac{1}{\sqrt{2}}+0\frac{i}{\sqrt{2}}
\end{pmatrix}
=
\begin{pmatrix}
\frac{1}{\sqrt{2}} \\
\frac{i}{\sqrt{2}}
\end{pmatrix}
$$
A tedy vidíme, že vlastní vektor odpovídá měřenému a předpokládanému, a tedy \(\lambda=1\).
Třípolarizátorový paradox
Tento paradox[10]Viz http://www.informationphilosopher.com/solutions/experiments/dirac_3-polarizers/[11]Viz http://alienryderflex.com/polarizer/[12]Viz polarize.pdf ukazuje zajímavou věc, která vypadá dost nemyslitelně; vezmeme-li dva polarizátory[13]Polarizační filtry…, které nastavíme kolmo na sebe (jejich roviny polarizace), ukazáali jsme si, že pravděpodobnost průchodu částice je \(0\). Nicméně, zařadíme-li mezi dva takové filtry třetí polarizátor pod nějakým úhlem, např. 45°, bude pravděpodobnost průchodu částice \(P: \left(0;1\right)\). Jak je toto možné? Využijme již známého matematického aparátu.
Víme už, že pravděpodobnost průchodu fotonem polarizačním filtrem o obecném úhlu \(\phi\) je \(p_{45}=\cos^2(\phi)=\cos^2(45)=\frac{1}{2}\). Připravíme-li proto polarizovaný proud částic, který pošleme 1. polarizátorem se stejným úhlem polarizace, tento nám daný paprsek nezmění (v rámci intenzity) a bude neustále \(100\%\) pravděpodobnost, že paprsek projde. Po 2. polarizátoru bude pravděpodobnost poloviční, tedy \(\frac{1}{2}\). No a po třetím, který je opět o oněch 45° otočen, bude pravděpodobnost:
$$
p_{II}=p_{45}\cos^2(45)=\frac{1}{2}\cdot\frac{1}{2}=\frac{1}{4}=25\ \%
$$
Pravděpodobnost průchodu takové částice je tedy \(45\ \%\). Ale pozor! Jde o světlo, které už máme polarizované, pokud do prvního polarizátoru pošleme nějaké obecné nepolarizované světlo, uvidíme, že už po prvním filtru budeme mít mnohem menší pravděpodobnost průchodu částice, konkrétně \(\frac{1}{2}\), pokud tedy bychom měřili nějakou intenzitu mezi vstupujícím světlem a výstupním světlem, dostaneme se ještě na polovinu z oněch \(25\ \%\), tedy na \(12,5\ \%\).
Samozřejmě bychom mohli dopočítat přes vlastní vektor, ale když jsme si už ukázali výstupy z této metody, můžeme jen vhodně zkombinovat výstupy, nicméně však by to vyšlo naprosto stejně 🙂
Definice matic pro výpočet
Stejně jako u polarizace, i zde můžeme využít hermitovských operátorů a dosazovat do rovnice. Polarizace a spin se budou chovat prakticky totožně[14]Až na pár velmi podstatných rozdílů, které si samozřejmě záhy ukážeme. (matematicky), budeme-li detekovat částice s nějakým spinem a do tohoto detektoru budeme posílat částice se spinem jiným či “pod nějakým úhlem”, výsledné výpočty budou téměř stejné[15]Tedy proporčně budou jako \(\cos^2(\phi)\), nicméně lehko odlišné..
Matice, které ve výpočtu používáme se jmenují Pauliho matice[16]Podle fyzika Pauliho, který za svůj vylučovací princip dostal Nobelovu cenu za fyziku. a mají tvar[17]Viz http://planetmath.org/PauliMatrices pro směry up/down, right/left a in/out jako:
$$
\mathrm{\hat{H}}_{u/d}=\sigma_z=
\begin{pmatrix}
1 & 0\\
0 & -1\\
\end{pmatrix}\\
\mathrm{\hat{H}}_{r/l}=\sigma_x=
\begin{pmatrix}
0 & 1\\
1 & 0\\
\end{pmatrix}\\
\mathrm{\hat{H}}_{i/o}=\sigma_y=
\begin{pmatrix}
0 & -i\\
i & 0\\
\end{pmatrix}
$$
Vidíte, že jsem označil jednotlivé matice jako \(\sigma_z\) a podobně — jednoduše matice, která má osu \(z\) je označená jako \(\sigma_z\) atd. 🙂 První matice, up/down tedy má osu \(z\) a proto je označená \(\sigma_z\). Podívejme se však na tutu matici trošku podrobněji. Proč jsou zvolené zrovna tyto hodnoty?
Víme, že (chceme, aby…) bude platit:
$$
\begin{pmatrix}
a & b \\
c & d
\end{pmatrix}
\begin{pmatrix}
1 \\ 0
\end{pmatrix}
=
1
\begin{pmatrix}
1\\0
\end{pmatrix}
$$
Z toho můžeme velmi snadno určit neznámou matici (byť to na první pohled nevypadá). Napišme si, co víme, že bude platit za vztahy podle toho, jak bychom matici roznásobovali. První vztah tedy bude:
$$a \cdot 1 + b \cdot 0 = 1 $$
Z toho je naprosto jasně vidět, že ať bude \(b\) cokoliv, \(a\) musí být \(1\), aby byl součet čehokoliv a nuly jednička. Tedy vidíme, že \(a=1\). Pro druhý řádek máme:
$$ c \cdot 1 + b \cdot 0 = 0$$
Tedy vidíme, že \(c=0\). Nojo, ale co teď? 🙂 Pořád nám chybí dva výrazy, tak si pomůžeme tím, že známe dva vlastní vektory pro u a d spin, použijeme prostě jen “ten druhý” vlastní vektor (jestli jste první použili ten či onen je jedno, samozřejmě 🙂 ):
$$
\begin{pmatrix}
a & b \\
c & d
\end{pmatrix}
\begin{pmatrix}
0 \\ 1
\end{pmatrix}
=
-1
\begin{pmatrix}
0\\1
\end{pmatrix}
$$
A opět stejným způsobem:
$$ a \cdot 0 + b \cdot 1 = 0$$
Tedy vidíme, že \(b=0\). No a pro poslední možnost:
$$ c \cdot 0 + d \cdot 1 = -1$$
No a tady vidíme, že \(d=-1\). Celková matice je tedy:
$$
\sigma_z
=
\begin{pmatrix}
1 & 0 \\
0 & -1 \\
\end{pmatrix}
$$
A taková matice je Hermitovská (viz předchozí článek). Stejným způsobem dokážeme odvodit i ostatní matice, samozřejmě tam vždy použijeme trošku jiný trik, ale v principu je to pořád to samé, vyřešit nějak chytře rovnici o 4 neznámých:
$$
\begin{pmatrix}
a & b \\ c & d
\end{pmatrix}
\begin{pmatrix}
\frac{1}{\sqrt{2}} \\ \frac{1}{\sqrt{2}}
\end{pmatrix}
=
1
\begin{pmatrix}
\frac{1}{\sqrt{2}} \\ \frac{1}{\sqrt{2}}
\end{pmatrix}
$$
$$
\begin{pmatrix}
a & b \\ c & d
\end{pmatrix}
\begin{pmatrix}
\frac{1}{\sqrt{2}} \\ -\frac{1}{\sqrt{2}}
\end{pmatrix}
=
-1
\begin{pmatrix}
\frac{1}{\sqrt{2}} \\ -\frac{1}{\sqrt{2}}
\end{pmatrix}
$$
Pro zjednodušení budu předpokládat, že rovnici s maticemi mohu vynásobit libovolným číslem na obou stranách a rovnost zůstane zachována (chci se prostě zbavit neustálého obludného psaní \(\frac{1}{\sqrt{2}}\)). Mohu tedy říci, že:
$$
\begin{matrix}
a \cdot 1 &+& b \cdot 1 &= &1 \\
c \cdot 1 &+& d \cdot 1 &= &1 \\
a \cdot 1 &-& b \cdot 1 &= &-1 \\
c \cdot 1 &-& d \cdot 1 &= &1
\end{matrix}
$$
Nyní jen jednoduše sečtěme rovnice spolu, hned první a třetí rovnici, vznikne nám \(a+a = 0\), tedy je jasně vidět, že \(a=0\). Poté sečtěme 2. a 4. rovnici, tedy uvidíme \(b+b = 2\), tedy \(b=1\). Když toto vidíme, ve 4. rovnici rovnou vidíme, že \(1-d=1\), tedy \(d = 0\). No a stejně pokud vidíme z 2. rovnice \(c=1\). Tedy matice bude:
$$
\sigma_x
=
\begin{pmatrix}
0 & 1 \\ 1 & 0
\end{pmatrix}
$$
Nakonec se podívejme na výpočet \(\sigma_y\). Víme, že musí platit následující vztahy:
$$
\begin{pmatrix}
a & b \\ c & d
\end{pmatrix}
\begin{pmatrix}
\frac{1}{\sqrt{2}} \\ \frac{i}{\sqrt{2}}
\end{pmatrix}
=
+1
\begin{pmatrix}
\frac{1}{\sqrt{2}} \\ \frac{i}{\sqrt{2}}
\end{pmatrix}
$$
$$
\begin{pmatrix}
a & b \\ c & d
\end{pmatrix}
\begin{pmatrix}
\frac{1}{\sqrt{2}} \\ -\frac{i}{\sqrt{2}}
\end{pmatrix}
=
-1
\begin{pmatrix}
\frac{1}{\sqrt{2}} \\ -\frac{i}{\sqrt{2}}
\end{pmatrix}
$$
Udělejme to stejné, co jsme dělali výše:
$$
\begin{matrix}
a &+& b i &= &1 \\
c &+& d i &= &i \\
a &-& b i &= &-1 \\
c &-& d i &= &1
\end{matrix}
$$
Pokud sečteme 1. a 2. rovnici, vidíme, že \(2a = 0\), tedy že \(a=0\). Pokud je \(a=0\), poté musí platit, že \(bi=1\), a tedy \(b=\frac{1}{i}=-i\). Nyní sečtěme 2. a 4. rovnici, vyjde, že \(2c=2i\), tedy \(c=i\). A samozřejmě tím pádem vidíme, že \(d=0\).
Spin obecně v obecném úhlu
Těchto matic můžeme využít při určení obecných pravidel, jak se chová spin, pokud “nevíme, co měříme”, ale prostě “to měříme”. Máme-li však nějakou částici (obecně) a nastavíme-li naše měřící zařízení “do obecného úhlu” vůči spinu této částice (protže netušíme, jak to může dopadnout). Označíme-li tedy obecně nějaký náš vektor \(\mathrm{\mathbb{\vec{u}}}\) jako vektor, poté můžeme psát složkově:
$$
\vec{u}=u_x + u_y + u_z
$$
A protože vektor bude (chceme, aby byl…) jednotkový, poté bude platit pythagoras:
$$
u^2_x+u^2_y+u^2_z=1
$$
Zpět ale k rovnici výše, kde jsem rozepsal pro jednotlivé souřadné osy. Asi vidíte, kam tím mířím a proč jsem tak udělal; vektory prostě lze klasicky lineárně sčítat, no a protože operátory už máme odvozené, můžeme jich rovnou využít v obecném zápisu:
$$
u_x\hat{\sigma_x}+u_y\hat{\sigma_y}+u_z\hat{\sigma_z}=\hat{\sigma_u}
$$
Tuto lineární superpozici snadno vyřešíme, obecně to vypadá takto:
$$
A\begin{pmatrix}a & b \\ c & d\end{pmatrix}+
B\begin{pmatrix}a & b \\ c & d\end{pmatrix}+
C\begin{pmatrix}a & b \\ c & d\end{pmatrix}
=
\begin{pmatrix}
Aa+Ba+Ca & Ab+Bb+Cb \\ Ac+Bc+Cc & Ad+Bd+Cd
\end{pmatrix}
$$
Takže:
$$
\hat\sigma_u =
u_x
\begin{pmatrix}
0 & 1 \\ 1 & 0
\end{pmatrix}
+
u_y
\begin{pmatrix}
0 & -i \\ i & 0
\end{pmatrix}
+
u_z
\begin{pmatrix}
1 & 0 \\ 0 & -1
\end{pmatrix}
=
\begin{pmatrix}
u_z & u_x-iu_y \\
u_x+iu_y & -u_z
\end{pmatrix}
$$
Rovnou z této matice (doufám!) vidíme, že je hermitovská. Proto můžeme \(\hat{\sigma_u}\) použít jako operátor ve známém:
$$
\hat{\sigma_u}\begin{pmatrix}\alpha\\\beta\end{pmatrix}=\lambda\begin{pmatrix}\alpha\\\beta\end{pmatrix}$$
A samozřejmě můžeme psát:
$$
\hat{\sigma_u}\begin{pmatrix}\alpha\\\beta\end{pmatrix}=+1\begin{pmatrix}\alpha\\\beta\end{pmatrix}$$
Nyní si budeme ještě muset lehce pohrát s normalizací vektoru \(\begin{pmatrix}\alpha\\\beta\end{pmatrix}\), protože jinak by nám opět vycházely divné hodtnoty pravděpodobností, typu 400 % a tak. Jak provést tedy normalizaci?
Abychom mohli takovou věc udělat obecně, musíme udělat opět takový malý trik. Není to nic nelegálního, ale hodně nám to zjednoduší práci. Pokud víme, že vlastní vektor bude vypadat tak, jak jsem psal v předchozí větě, stejně tak, pokud vím, že pokud chci, aby byl normalizovaný, bude jednotkový a tím pádem mohu předpokládat, že i nějaký jiný vektor, který místo něho použijeme (substitucí), bude-li jednotkový a bude mít stejné vlastnosti, bude použitelný stejně jako vektor původní. Tedy pokud prohlásíme, že:
$$
\begin{pmatrix}\alpha\\\beta\end{pmatrix}=\begin{pmatrix}1\\\alpha_0\end{pmatrix}
$$
a budeme-li dále pracovat s tímto vektorem, uvidíme, že si dost ulehčíme práci a zpětně se dostaneme tam, kde jsme začali, ale budeme mít vyřešenou normalizaci. Co je tedy tato hodnota \(\alpha_0\)? Pojďme se podívat, jak toto odvodit. Víme, že budeme-li předopkládat, že vektor \(\begin{pmatrix}1\\\alpha_0\end{pmatrix}\) bude normalizován, bude se chovat jako kterékoliv jiné vlastní vektory[18]to neznamená, že je to postačující podmínka takové funkce a bude platit:
$$
\begin{pmatrix}
u_z & u_x-iu_y \\
u_x + iu_y & -u_z
\end{pmatrix}
\begin{pmatrix}
1\\\alpha_0
\end{pmatrix}
=
+1
\begin{pmatrix}
1\\\alpha_0
\end{pmatrix}
$$
Zkusme vytvořit první rovnici:
$$
u_z + \alpha_0(u_x-iu_y) =1
$$
Z toho jasně dokážeme vyjádřit \({}\alpha_0{}\): 🙂
$$
\alpha_0(u_x-iu_y)=1-u_z
\alpha_0=\frac{1-u_z}{u_x-iu_y}
$$
A můžeme dosadit:
$$
\begin{pmatrix}
1\\\alpha_0
\end{pmatrix}
=
\begin{pmatrix}
1\\\frac{1-u_z}{u_x-iu_y}
\end{pmatrix}
$$
Nicméně tento vektor tedy nejspíše pořád nebude (s největší pravděpodobností) normalizován. A s tím si musíme poradit. Musí tedy současně platit dva následující vtazhy:
$$
|\phi\rangle=
\begin{pmatrix}
1\\\alpha_0
\end{pmatrix}
\\
\phi\phi^*=1
$$
Musí tedy platit:
$$
\begin{pmatrix}
1 &\alpha_0
\end{pmatrix}
\begin{pmatrix}
1\\\alpha_0
\end{pmatrix}
=
1
$$
Budeme chvilku předpokládat, že stále “nejsme normalizováni”. Zvolme si za normalizační konstantu například \(\nu\). Potom bude platit, že normalizovaný vztah výše bude vypadat jako:
$$
|\phi\rangle=
\nu\begin{pmatrix}
1\\\alpha_0
\end{pmatrix}
$$
Můžeme tedy psát:
$$
\nu
\begin{pmatrix}
1 & \alpha_0
\end{pmatrix}
\nu
\begin{pmatrix}
1 \\ \alpha_0
\end{pmatrix}
=
1
$$
a to řešit jako
$$
\nu^2
\left(
1+\color{red}{\alpha_0^*}\color{green}{\alpha_0}
\right)
= 1
$$
To vyřešíme (dosadíme za \(\alpha_0\)):
$$
\nu^2
\left[
1+
\color{red}{
\left(
\frac{1-u_z}{u_x+iu_y}
\right)
}
\color{green}{
\left(
\frac{1-u_z}{u_x-iu_y}
\right)
}
\right]
=1
$$
A teď nastane opravdový “hustý trik” 🙂 Víme, nejprve roznásobíme (to trik ještě není):
$$
\nu^2
\left[
1+
\left(
\frac{\left(1-u_z\right)^2}{u_x^2+u_y^2}
\right)
\right]
=1
$$
A nyní nastane velký trik. Víme, že nahoře jsme pro připomenutí psali, že u jednotkového vektoru bude platit pythagorské:
$$
\color{pink}{u_x^2+u_y^2}+u_z^2=1
$$
Barevně máme označenou část, kterou však máme ve jmenovateli! Můžeme tedy místo jmenovatele psát:
$$
u_x^2+u_y^2=1-u_z^2
$$
A to nám (jak vidíte) hodně zjednoduší práci 🙂
$$
\nu^2
\left[
1+
\left(
\frac{\left(1-u_z\right)^2}{1-u_z^2}
\right)
\right]
=1
$$
Nyní můžeme rozložit jmenovatele a zkrátit:
$$
\nu^2
\left[
1+
\left(
\frac{\left(1-u_z\right)^2}{\left(1-u_z\right)\left(1+u_z\right)}
\right)
\right]
=1
$$
$$
\nu^2
\left[
1+
\frac{\left(1-u_z\right)}{\left(1+u_z\right)}
\right]
=1
$$
$$
\nu^2
\left[
\frac{\left(1+u_z\right)}{\left(1+u_z\right)}
+
\frac{\left(1-u_z\right)}{\left(1+u_z\right)}
\right]
=1
$$
$$
\nu^2
\left[
\frac{2}{\left(1+u_z\right)}
\right]
=1
$$
Z toho už snadno odvodíme \(\nu\) jako:
$$
\nu^2=
\frac{1+u_z}{2}
$$
a tedy:
$$
\nu = \sqrt{\frac{1+u_z}{2}}
$$
A tím máme normalizační faktor vyřešený. Jako zkoušku si klidně (můžete sami) dosaďte za \(u_x=1\) a ostatní prvky dejte nulové, vyjdou vám vlastní vektory, které už jsme používali. Pouze dosaďte do:
$$
|\phi\rangle=
\sqrt{\frac{1+u_z}{2}}
\begin{pmatrix}
1 \\
\frac{1-u_z}{u_x-iu_y}
\end{pmatrix}
$$
Uvidíte, že to bude vycházet 🙂
Tolik asi k normalizaci. Pokud bychom obecně připravili nějakou částici v obecném stavu a úhlu, měřili ji v jiném obecném úhlu, vyjde nám pravděpodobnost \(P=\cos^2\frac{\phi}{2}\) (využijeme při tom výpočtů, které už jsme si tady ukazovali, nic jiného). Tento článek už je poměrně dlouhý, proto ho zde nyní utněme (v nejlepším přestat, že 🙂 ) a příště se věnujme dalším věcem a zákonitostem, které s polarizacemi a spinem souvisejí.
Poznámky pod čarou
| ⇧1 | Pro další informace rozhodně doporučuji tento popis experimentu: ElektronovySpin.pdf. |
|---|---|
| ⇧2 | Redukované planckovy konstanty, tedy \(\hbar=\frac{h}{2\pi}\). |
| ⇧3 | Opět — osu bude mít pouze v makroskopickém světě, v případě spinu hovořit o ose rotace je chybné. |
| ⇧4 | Komplexně konjugované číslo, pro zopakování, je číslo, které má stejnou reálnou část, ale opačnou imaginární. Sami vidíme, že u reálných čísel se jedná opravdu o “umocnění na druhou”. |
| ⇧5 | vše vztaženo k experimentu, kdy měříme “je to u?” |
| ⇧6 | Velmi podobné ortogonálním, jen mají jednotkovou velikost. Ortogonální vektory nám říkají, že pokud je jeden “něčím”, pak ten druhý je vším jen ne “něčím”, tedy např. pokud jeden vektor popisuje stav u, poté ortogonální popisuje stav přesně ne-u, tedy d 🙂 (Ano, tyto vektory jsou tedy lineárně nezávislé a tvoří bázi prostoru, ale lineární algebru nechme na jindy.) |
| ⇧7 | Protože 2. mocnina čehokoliv z $latex\mathbb{R}$ bude kladné číslo. |
| ⇧8 | Viz https://www.eng.tau.ac.il/~shtaif/PolarizationClass.pdf. |
| ⇧9 | Co to je, jsme řešili v minulém článku. |
| ⇧10 | Viz http://www.informationphilosopher.com/solutions/experiments/dirac_3-polarizers/ |
| ⇧11 | Viz http://alienryderflex.com/polarizer/ |
| ⇧12 | Viz polarize.pdf |
| ⇧13 | Polarizační filtry… |
| ⇧14 | Až na pár velmi podstatných rozdílů, které si samozřejmě záhy ukážeme. |
| ⇧15 | Tedy proporčně budou jako \(\cos^2(\phi)\), nicméně lehko odlišné. |
| ⇧16 | Podle fyzika Pauliho, který za svůj vylučovací princip dostal Nobelovu cenu za fyziku. |
| ⇧17 | Viz http://planetmath.org/PauliMatrices |
| ⇧18 | to neznamená, že je to postačující podmínka takové funkce |